Abstract
The ability for autonomous robots to understand their surroundings is instrumental for their ability to interact and navigate the environment safely and effectively. Current autonomous platforms rely heavily on LIDAR and optical camera sensors due their high resolution, compact form factor, and integration accessibility.
In emergent applications for robotics like search and rescue as well as situations that push the envelope within mainstream applications, harsh environmental conditions like dust, rain, fog, or snow limit the performance of contemporary optical sensor suites.
Radar imaging uses lower frequencies with wavelengths in the millimeter to centimeter range, while optical methods utilize wavelengths in the hundreds of nanometer range. The longer wavelength of radiofrequency sensing increases dependability in certain situations at the expense of yielding inferior resolution.
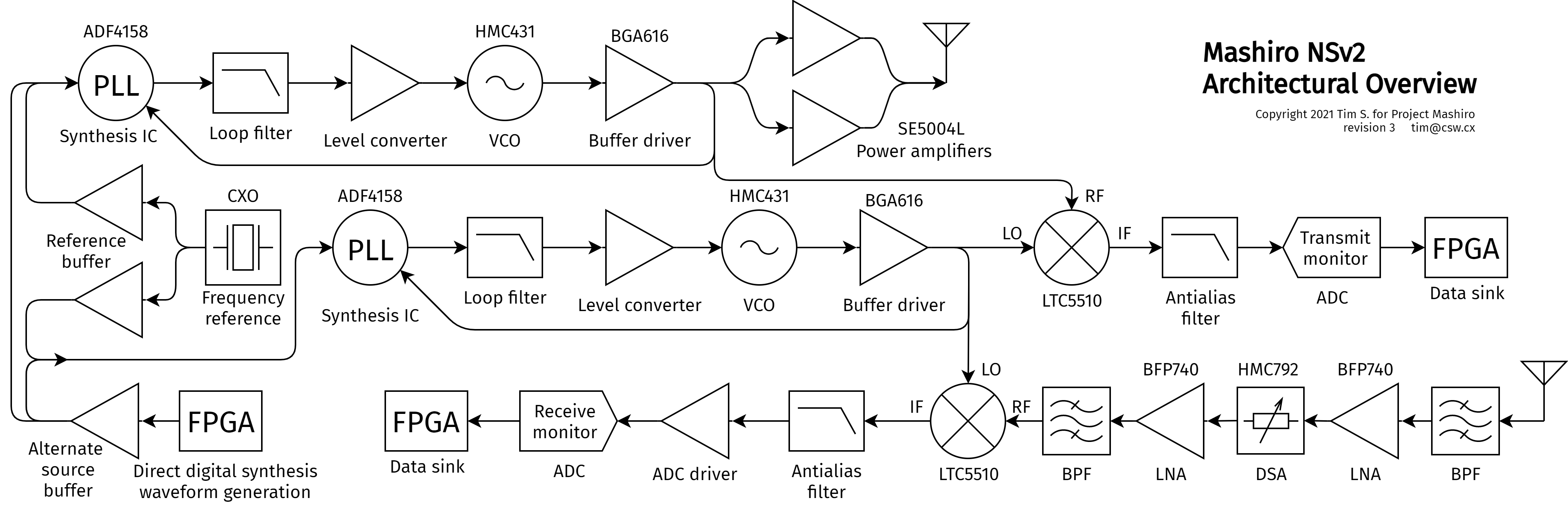
Our system operates at 5.8 GHz for improved immunity from environmental interference compared to typical 77 GHz automotive systems, as well as increased resolution from radar platforms that operate at an even lower frequency. We also apply Synthetic Aperture Radar imaging technique to enhance effective resolution by utilizing the motion of the platform to synthesize a larger virtual aperture aided by computation in hardware.
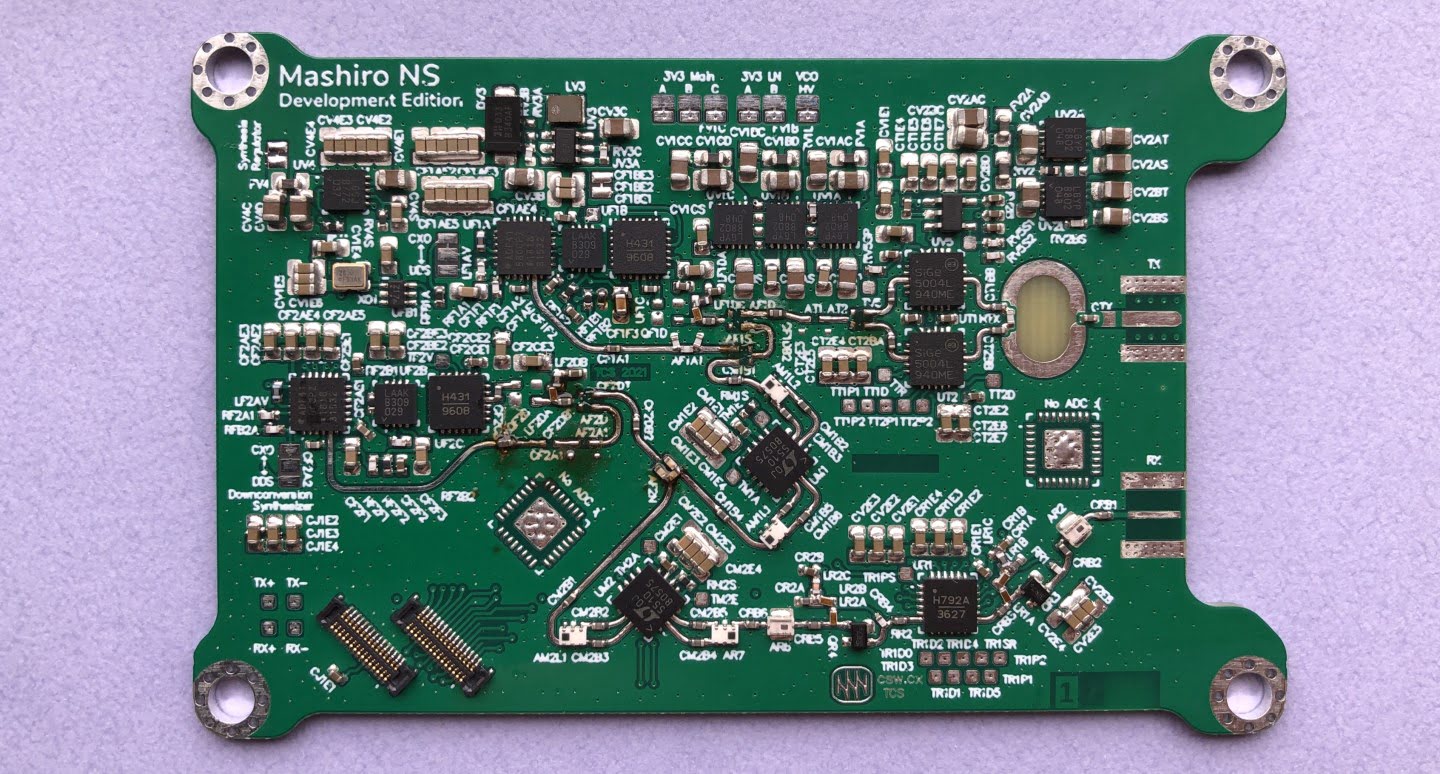
We developed an alternative radar architecture featuring two independent synthesizers and downconverters which allow much greater flexibility and performance compared to existing systems which produce baseband at near zero frequency. Our platform is also physically compact, economical, and flexible in realization, which makes it suitable for deployment in size constrained applications and easily extended to fit specific use cases.
Media
Here are some resources related to Project Mashiro.
This video showcases our progress as of our first iteration. Please watch from 5:00 to 8:00 for the essential information. If you could spare the time, we do encourage you to watch the entire video. We put a lot of effort into it.
About
We are Tim and Pranav. We started Project Mashiro around August 2020.
Tim S.

I make all the circuits and general design for Project Mashiro.
Pranav S.
I write all the emails and do all the signal processing stuff for Project Mashiro.
Discussion